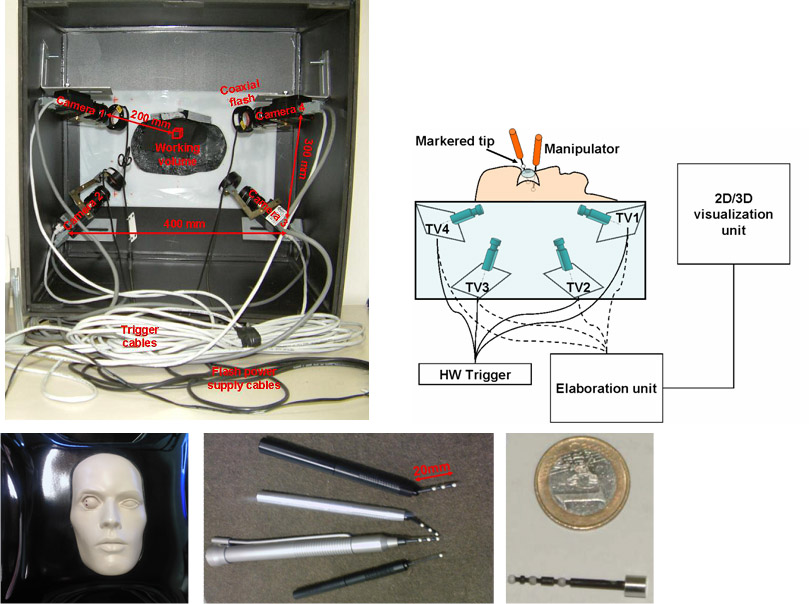
Micro-Motion capture. The
system is based on a four cameras firewire architecture. It provides in
real time at 25Hz the 6dof of up to different surgical instruments (a
3min, 256Mbyte video, can be viewed from here),
while it is manouvred by the surgeon (12Mbyte video, click here).
The instruments are markered with spherical white markers on the axes
of their tips, also when moving fast (12Mbyte video, click here).
Thanks to dedicated image processing algorithms, its performance is superior
to commercial systems now on the market.
The two main features are:
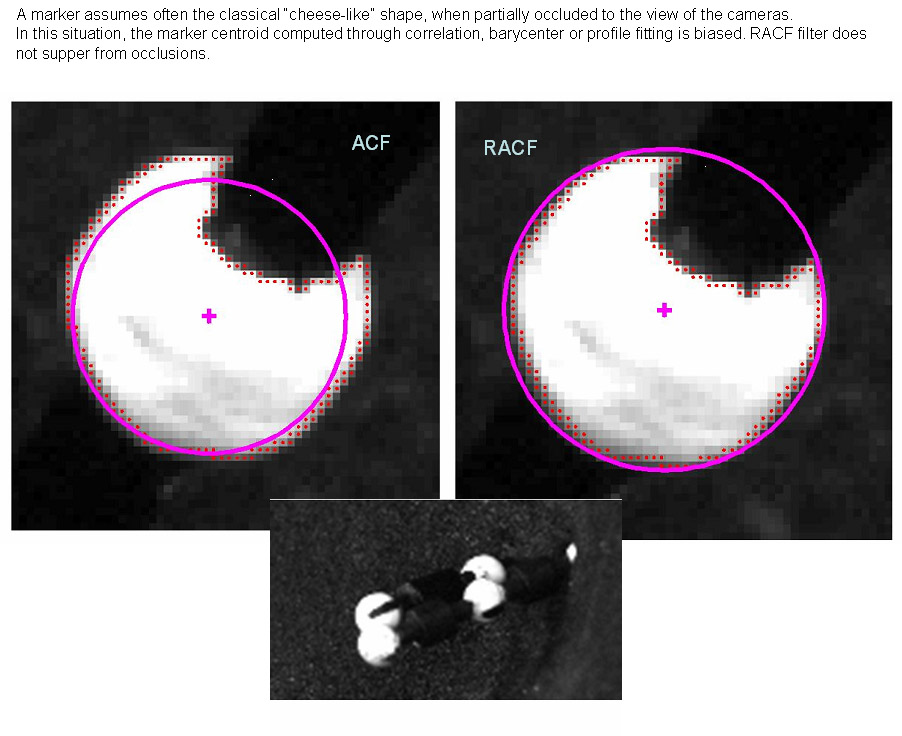
A). Detection of the markers with
an innovative circle fitting algorithm, which is not sensitive to partial
occlusions or overlapping (to read more, click here).
2. The reconstruction of the axial rotation using only spherical markers
on the axis, painting a line on the surface of at least one of it (to
read more, click here TO BE SUBMITTED).
{kind=link}
This methodology has been patented.
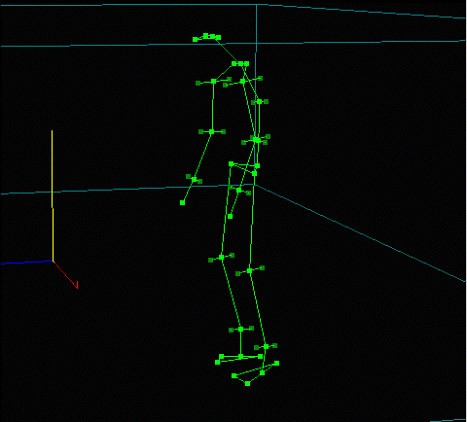
Tracking. A new approach to the reconstruction of 3D trajectories of dense marker sets has been developed. Key element is the use of multiple passes to reconstruct the spatio-temporal structure of the movement with high reliability. First the tracking procedure computes a coarse structure of the motion, which is then recursively refined disambiguating difficult classification of the markers. The tracking procedure is based on integrating the temporal dimension in the matching process, by analyzing strings instead of points to derive more robust matches. Strings are analyzed using smoothness, n-focal constraints, and fitting of a skeleton to derive a proper matching. An innovative augmented-reality like interface greatly simplifies the labeling task. Lastly, a proper value for the critical parameters is automatically derived. Results on real data show that the system is able to produce a robust and largely complete set of trajectories, which greatly minimize the time required by post-processing editing sessions. A preliminary report has been published in the proc. of the first IEEE conference on 3DPVT (2002). Some results can be downloaded: escape (1,975k), fall_run (1,966k), run (472kbyte), roll (1,310k) and one trial with more than 150 markers tracked (1,702k).

Self-Calibration. Calibration is carried out surveying only a rigid bar carrying two markers on its extremities, moved inside the working volume. The external parameters are estimated through the epipolar geometry up to a scale factor which is determined from the true length of the bar. The focal lengths are determined using the properties of the absolute conic in the projective space. The principal points are computed through a non-linear minimization carried out through an evolutionary optimization (2001 IEEE Trans. Evol. Computation). The accuracy of the method compares favorably with that obtained through classical approaches based on control points of known 3D coordinates. It requires 20 seconds on a PC, Pentium II. More can be learnt from the 2000 Pattern Recognition paper.
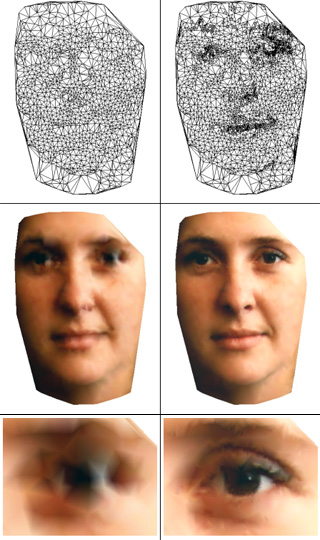
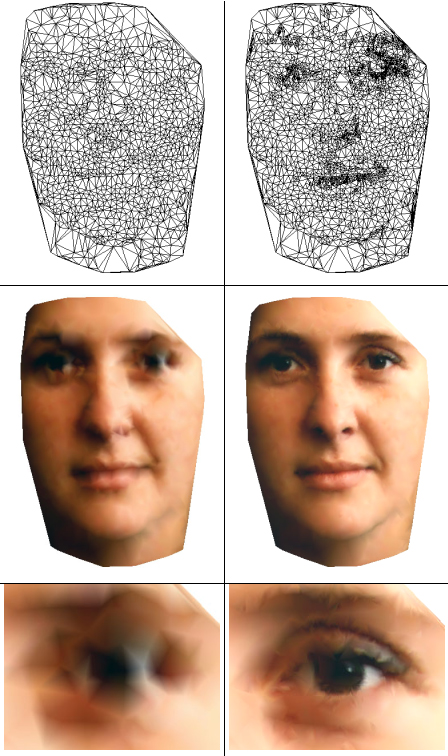
The left mesh is constituted of 2,505 triangles, the mesh on the right
of 4,307. Click here for a picture
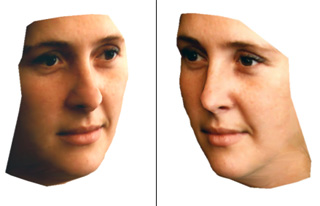
of higher resolution. Two different views
of the re-tiled model.
{kind=link}
{kind=link}

Last update 31.10.2012